Dust Detector
| 
| 
|
|
|
|
|
As part of the Dust Collector Automation (DustAuto) project, in order to prevent Dust Bin overflows from clogging the filter, I wanted to include a Dust Detector. The dust detector would have the ability to shut down the system if the dust bin is full.
I have made 3 attempts at bilding a dust detector for the dust bin.
1. I tried an ultrasonic distance measuring device which worked great when the dust bin wasn't full but, when the dust bin, under the cyclone, starts to fill a cone or small hill starts to form. As this cone forms the ultrasonic system starts displaying more and more erratic distances. The cone's almost vertical sides deflect the sound pulses in many directions so the echos return after bouncing around in the dust bin, and since the distance is based on the time of echo return, we get many bad distance readings. The closer to full the bin gets the worse the distance readings.
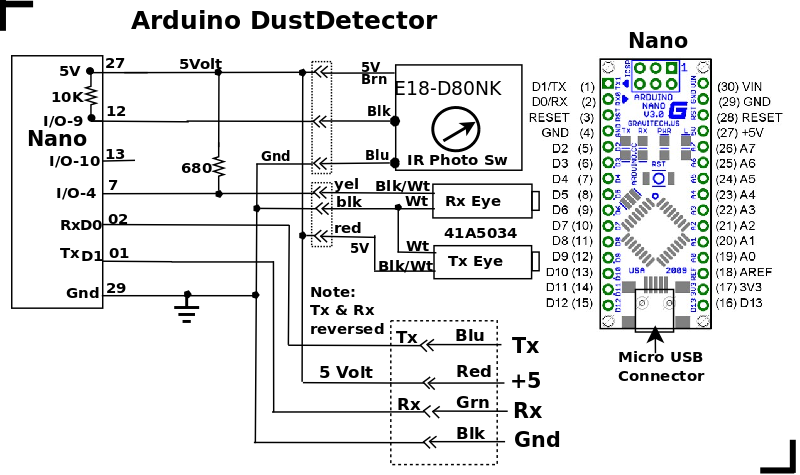
2. This Dust Detector will use infrared. I looked at the Banner detector (QS18VP6D) used by Oneida's Dust Sentry, but it was expensive ($31.19), and required 10 volts (I only have 5 volts available unless I add another power supply), so I'm going to try some cheaper devices first. So far, the devices I've looked at don't return distance only a go/nogo (hi low) with a distance pot on the device, so that means some changes to the DustAuto program. The sensor I'll try first is a E18-D80NK which draws less than 25Ma, available from several sources. The E18-D80NK costs $13 for 3 of them, about $4.33 each, I usually buy a backup so this is not a bad deal, especially considering the Banner device @ $31.19 (cheapest I could find). The only thing unusual about these sensors, the 3 wire color choices, BROWN: +5, BLACK: output, BLUE: ground. These sensors have a tiny little pot (potentiometer) on the back end to adjust the distance it will trigger on and an LED which lights when something is too close which is handy for setting it up. It's output needs a pullup resistor and goes low when something is detected in it's range. The info on it says it has an NPN, normally open output, I'm thinking an open collector, so I'll make sure the Nano sketch uses a pullup on that pin.
3. The 3rd dust detector uses a 41A5034 Safety Sensor (garage door safety sensor), or photo eye. I want the sensor to run on 5volts, and this guy does. The output is either a negative pulse stream at 600Hz (which pulsein() returns the pulse width about 450Us) or a 4 volt dc voltage, which pulsein() returns as zero. I decided to retain the other IR since I don't enjoy cleaning out a clogged filter and redundancy is good. Changes to the hardware are minimal, I only added a 680 ohm pull-up resistor for the beam receiver, everything else was just connections. Changes to the software was also minimal, I added one function to read the sensor, and make sure it had a number of blocked before it cried wolf.
|
|
CLick For Larger Pic
|
|
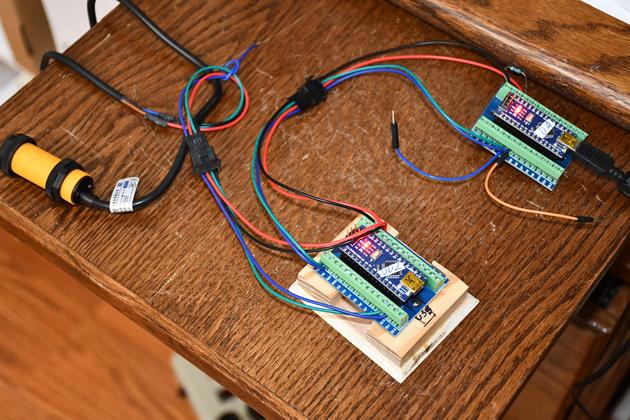
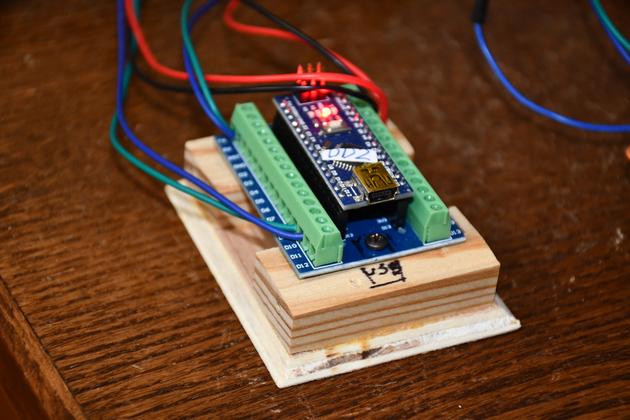
My test rig, the Nano in the foreground is the actual DestDetector2, still mounted on it's base.
The Nano at the top is on another Nano breakout board and connected to the Arduino IDE running on my workstation.
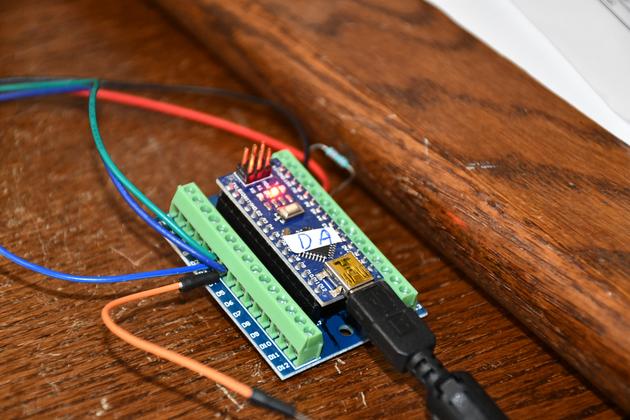
The yellow device on the left is the E18-D80NK Infrared detector.
|
|
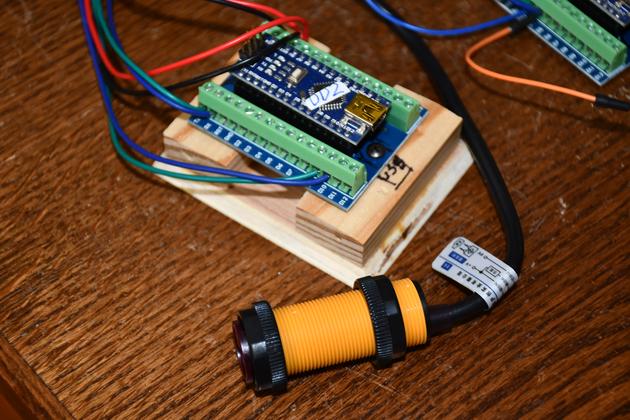
The E18-D80NK next to the Nano DD2. Note the Nano breakout board is mounted on it's bottom for the Nano Mount. |

|
Back end of the E18-D80NK, the pot is on the left and the LED is on the right. |

|
Object detected, red LED on. |
|
The DustDetector2 Nano mounted on it's cabinet base. |
|
This a another Nano, on a Nano breakout board, running the Dust Auto program. I can use the Arduino IDE to enter data and display it's outpu just like the terminal in the actual system. |

|
|
